Author: dallincordon
-
Autonomous Aircraft
in SoftwareThis project presents the comprehensive development of an autonomous miniature fixed-wing aircraft simulation system created in Python. Beginning with fundamental aircraft dynamics and kinematics modeling, the implementation progresses through linear system analysis, autopilot design, and sensor integration with state estimation. The system capabilities expand to include sophisticated path planning and following algorithms, ultimately culminating in…
-
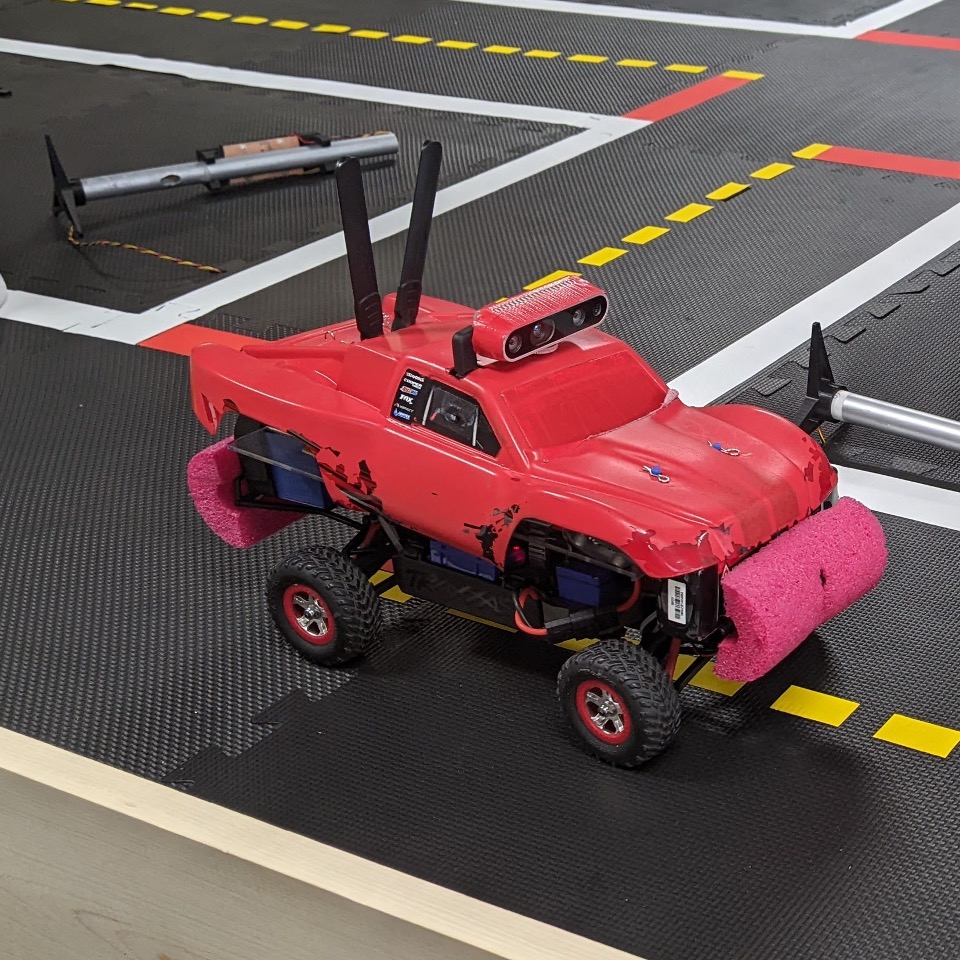
Self-Driving Car
As part of my robotic vision coursework, I coded an autonomous monster truck that could navigate indoor hallways at high speeds. Using an NVIDIA Jetson TX2 board and Intel RealSense camera, I implemented computer vision algorithms that allowed the vehicle to detect and stay within hallway boundaries, smoothly navigate corners, and race toward the finish…
-

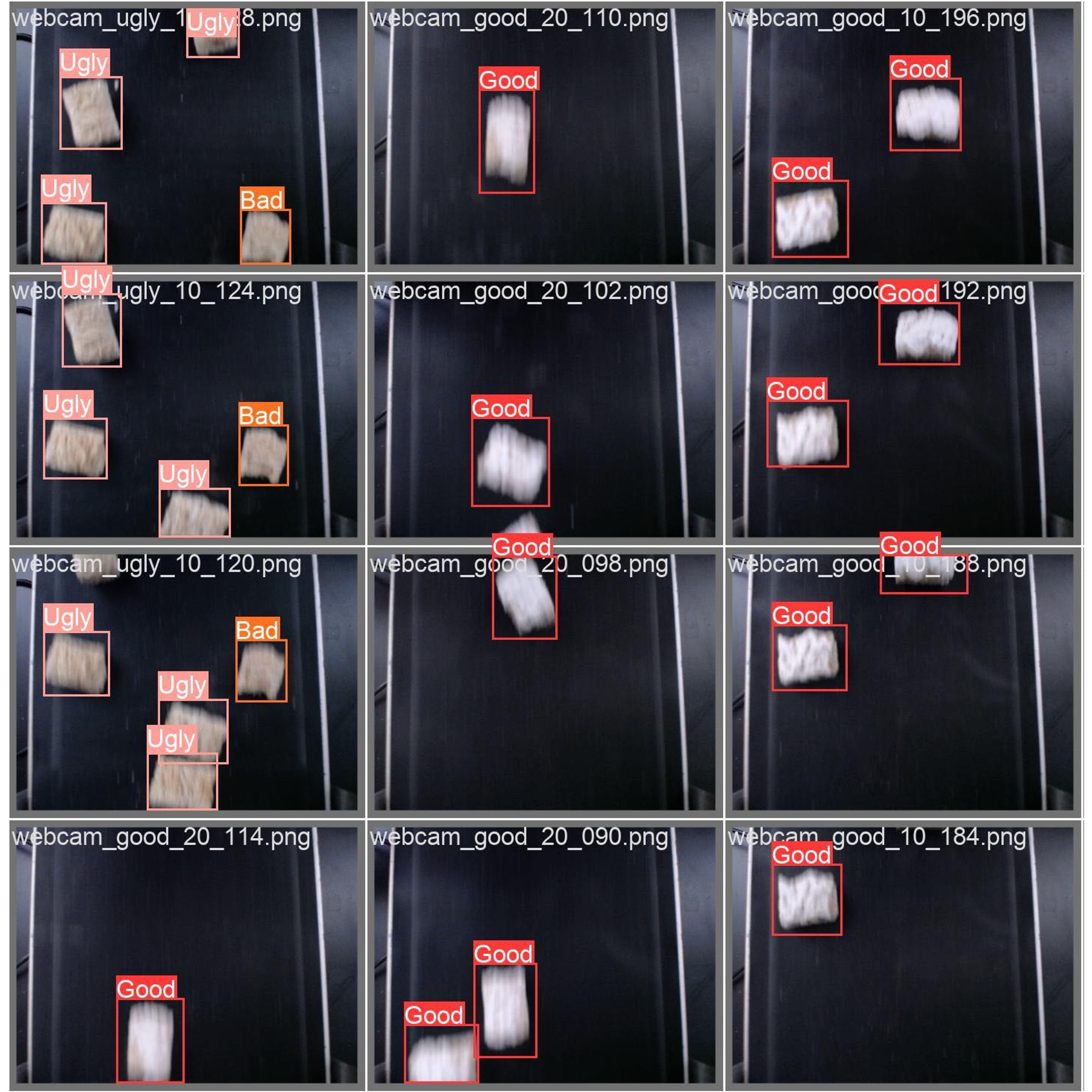
Automated Ball Catcher
In my Robotic Vision course, our team developed a high-speed vision system that could track and catch baseballs in real-time using stereo cameras. The system had to process stereo image pairs, calculate the ball’s 3D trajectory, and command a robotic catcher to intercept the ball – all within a fraction of a second. Technical Challenge…
-

BYU Mars Rover
Our capstone team at Brigham Young University designed and built a Mars rover capable of performing a myriad of tasks in preparation for the University Rover Challenge (URC). The Challenge The URC challenge, held at the Mars Desert Research Station in southern Utah, consists of four critical missions: Space Configuration Challenges Among the many challenges…
-

Experimental High-Power Team
As team lead for BYU Rocketry‘s Experimental High-Power Team, I directed a multi-disciplinary project that challenged both my technical and leadership abilities across two semesters. Leading a nine-person team split across three specialized sub-teams (Payload, Guidance Navigation & Control, and Structures), I managed the development of a Level 3 high-power rocket designed to precise competition…
-
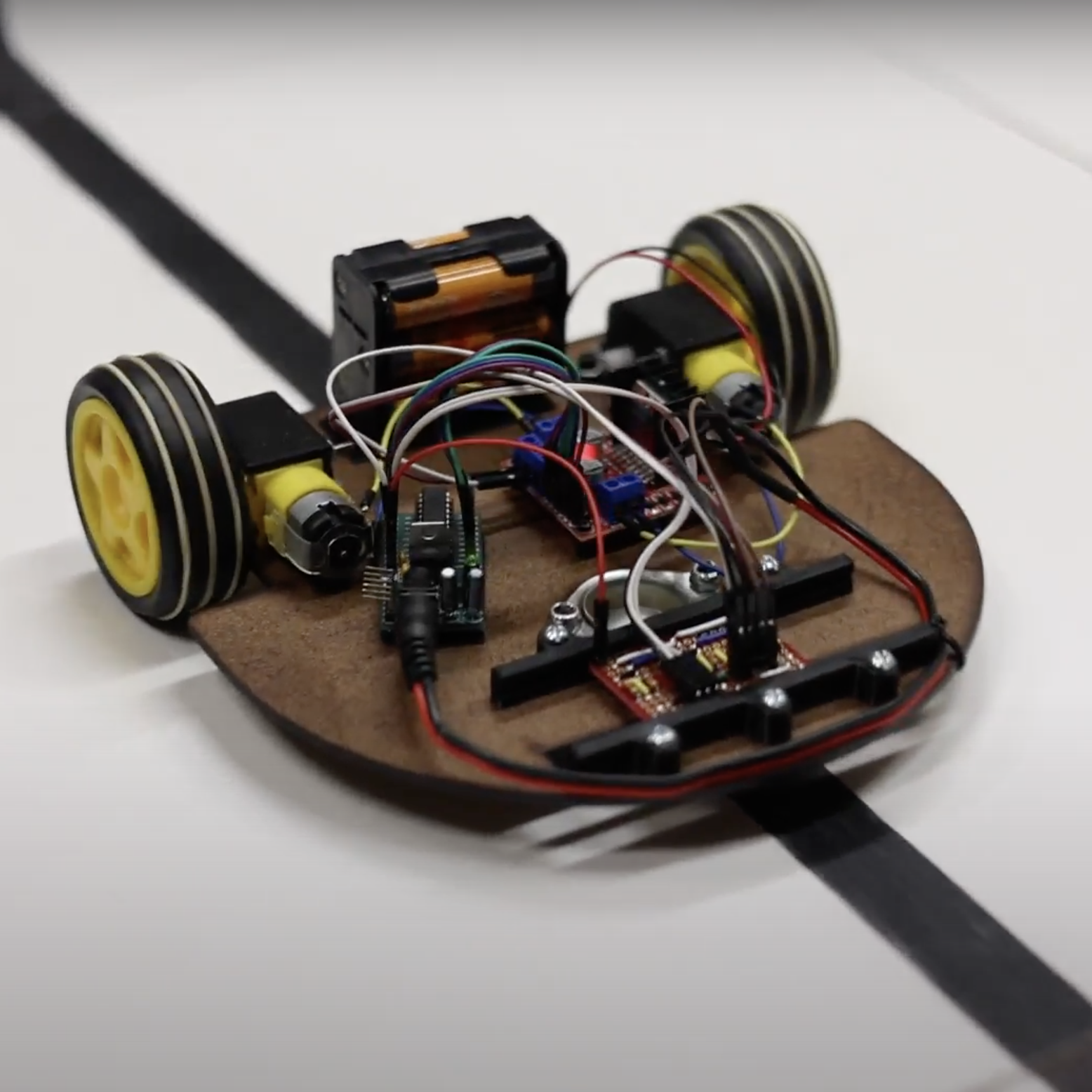
Line Following Robot
Developed as a solo project for a mechatronics course during the COVID-19 pandemic, this line-following robot represented a comprehensive engineering challenge. With traditional team-based project work disrupted by social distancing requirements, I was responsible for every aspect of the robot’s development—from initial concept and hardware design to software implementation and final testing. The project became…
-
-
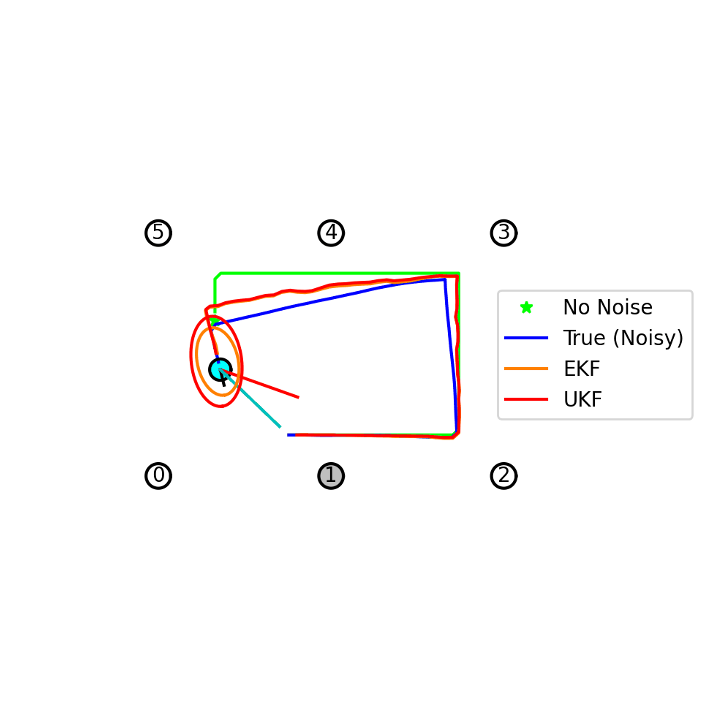
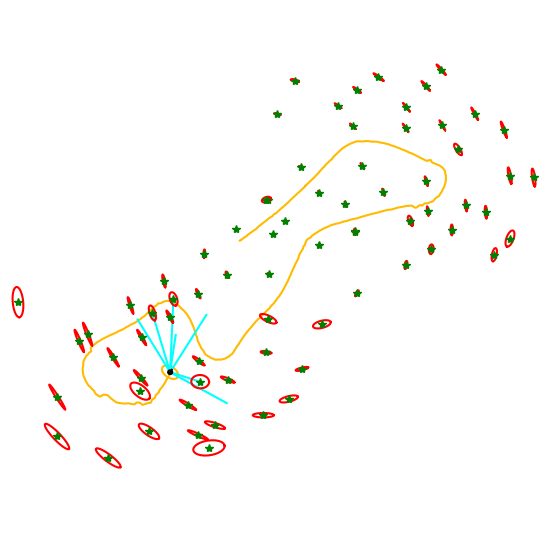
Kalman Filters
In this project, I implemented Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) algorithms for landmark-based robot localization. The goal was to estimate the robot’s position and orientation using noisy bearing measurements from known landmarks and odometry data. I developed the EKF and UKF update functions, integrated them into a simulation environment, and analyzed…
-

Occupancy Grid Mapping
In my Robotic Localization and Mapping course, I completed a lab focused on occupancy grid mapping. The goal was to implement an algorithm that could process simulated laser range measurements and generate an accurate map of a building. What is Occupancy Grid Mapping? Occupancy grid mapping is a probabilistic approach used in robotics to create a…
-